
Luai Abuelsamen
Hi! I’m a Master’s student in Robotics at UC Berkeley working on embodied AI systems that bridge foundation models with real-world control. My research spans from multimodal perception for robot manipulation to large-scale autonomous systems simulation.
Currently, I work as a Graduate Student Researcher at PATH, building traffic simulation tools to evaluate infrastructure impacts on autonomous vehicle behavior. I also collaborated with the Autonomy, Robotics, and Controls (ARC) Lab on manipulation research combining learning-based control with multimodal perception.
Previously, I studied Mechanical Engineering at McGill University and interned at Tesla, Beta Technologies, and Vention, where I worked on embedded systems, mechatronic design, and simulation tooling for robotic platforms.
Research Interests:
- Foundation models for robotics and embodied AI
- Multimodal perception and imitation learning
- Model-based and learning-based control
- Sim-to-real transfer and real-time planning
- Multi-agent systems and intelligent infrastructure
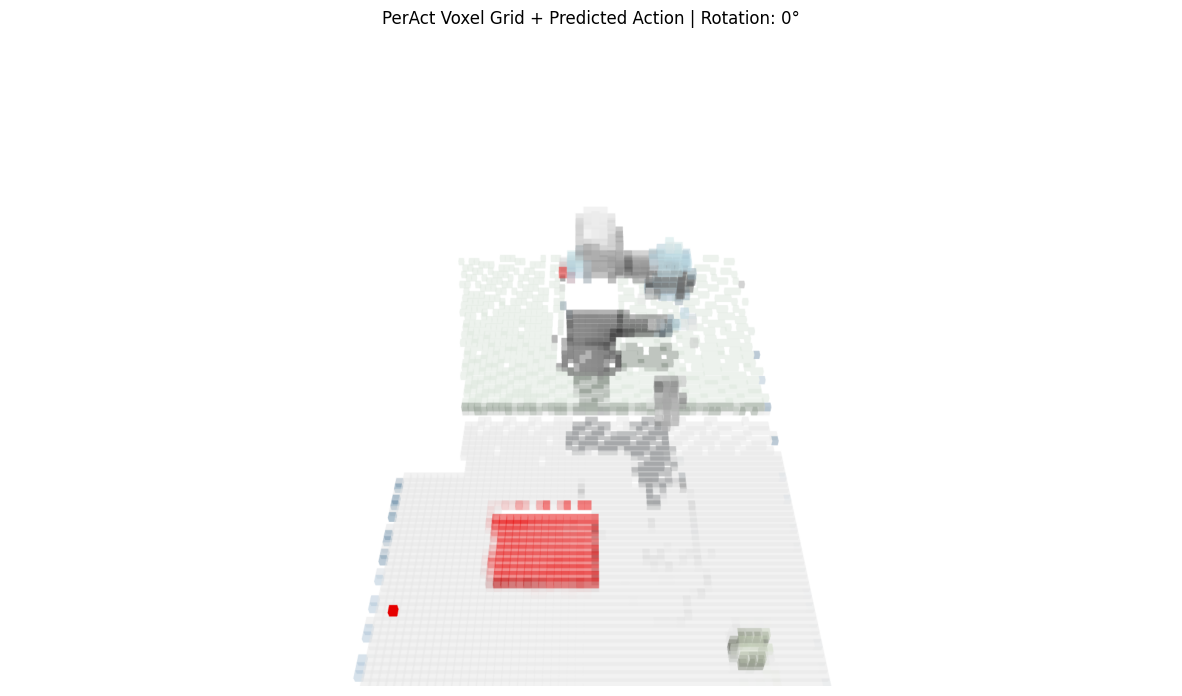
Imitation Learning with Residual RL Fine-Tuning
Trained imitation learning policies using LeRobot framework and fine-tuned them in simulation with residual reinforcement learning, combining behavior cloning with policy optimization for improved robotic manipulation performance.
Rerouting Impacts of Auxiliary Lanes
Conducted microsimulation research using Aimsun Next to evaluate how auxiliary lane removal affects freeway and arterial network performance in mixed-autonomy scenarios. Work performed at UC Berkeley – California PATH.
PCB Design: Raspberry Pi Motor Controller Hat
Custom PCB enabling high-current servo control and force sensing for autonomous robots, with integrated power regulation and I²C multiplexing for research platform development.
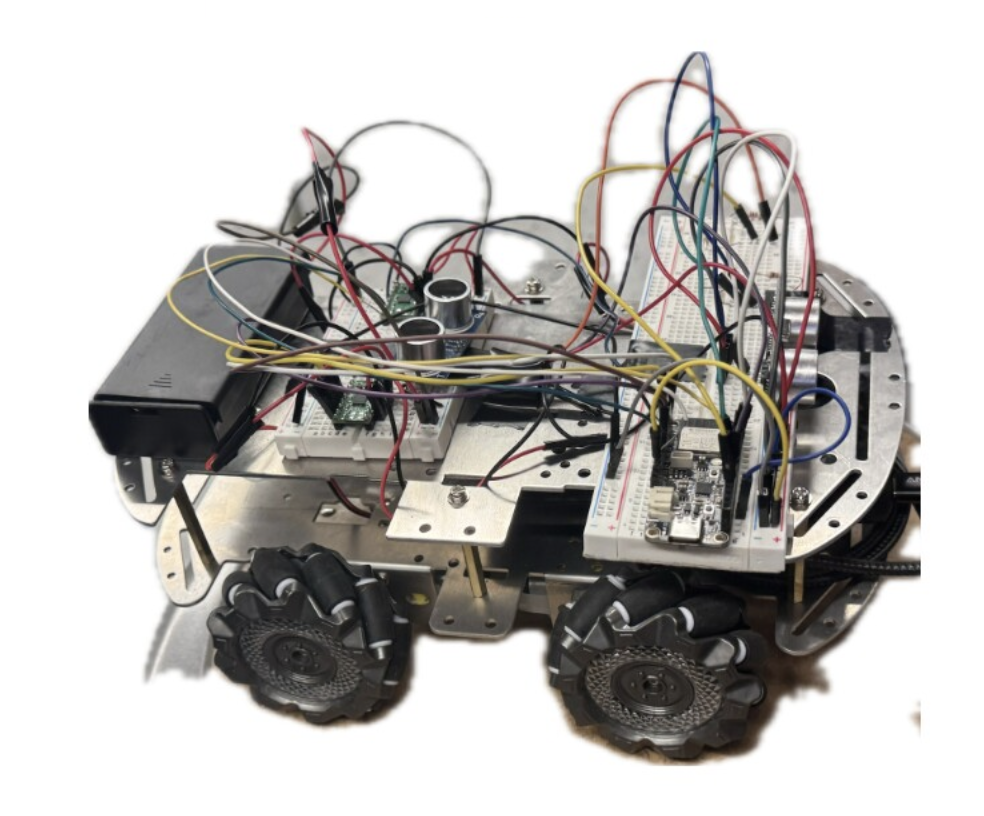
BLE-Controlled Mecanum Robot with FreeRTOS
Developed embedded firmware in C for a mecanum-drive mobile robot featuring dual-mode operation (autonomous/manual), BLE GATT server, ultrasonic obstacle detection, and PWM motor control—all orchestrated with real-time FreeRTOS task scheduling.